産業ロボット、ハンドリングロボット、搬送ロボット、光ファイバー伝送製造 アルミ鋳造
動画を見てね
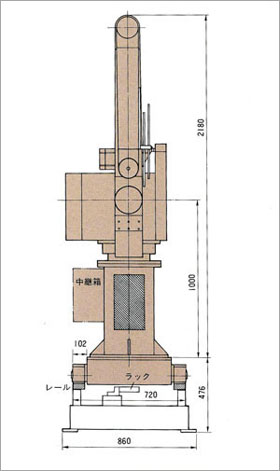
PR4C-R ■ 関節型走行式(旋回ナシ)
PR5C-R ■ 関節型走行式(旋回付き)
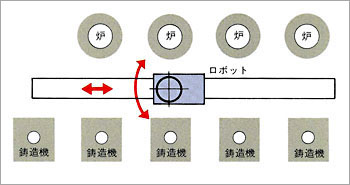
■レール上を走行し、レールに沿って設置された鋳造機に注湯するロボットです。
■レールの標準長は5mですが、現場の実情等に合わせて増減することも可能です。長くする場合はレールの延長分とロボットケーブル及びキャッブフレックスの増加分が価額に加算されます。
■ロボット機能は、走行を除いてPR4C-Bと変わりません。
■走行スピードは最大1000mm/secですが、スタートと停止時の加減速は調整できますし、また湯の搬送中に適宜スビードを調整する事も可能です。
■PR4C-Rは旋回無しPR5C-Rは旋回付きです。
PR4CL-R ■ 大型関節走行式(旋回ナシ)
PR5CL-R ■ 大型関節型走行式(旋回付き)
■ PR4C−R/PR5C−Rをそれぞれ大型化した走行式ロボットです。
■ PR4Cl−Rは走行軸を入れて4軸の自由度を持ち、PR4C−R同様旋回はしません。
■ PR5CL−Rは5軸の自由度、PR5C−R同様旋回機能を持っています。
関節型走行式
関節型定置式
超大型水平関節型定置式
多重伝送端子台
他・専用機
ページトップへ戻る
TOP
/
会社概要
/
納入実績
/
技術紹介
/
仕様書
/
お問い合わせ
/
採用情報
/
関節型走行式
/
関節型定置式
/
超大型水平関節型定置式
/
多重伝送端子台
/
他・専用機
NCネットワークに登録しています
ロボット FAシステム設計・製作・販売
株式会社プラス電機
本社/〒433-8108 静岡県浜松市中央区根洗町26
TEL:053-437-7211 FAX:053-437-1137