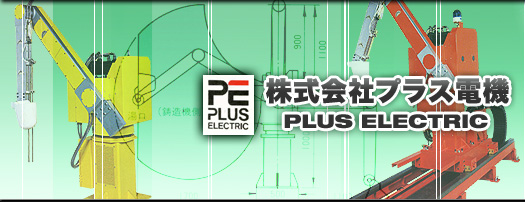
鋳造は、高温な場所で重労働を行う作業環境にあります。その環境改善と、作業員の疲労のために起こりやすい品質のばらつきをなくすために開発されたのが、プラスの鋳造用ロボットです。
プラスの鋳造用ロボットは、マイクロコンピュータ制御により、4または5の自由度をコントロールして保持炉からラドルで湯を汲み上げ、直接金型に注湯できるとともに、注湯量の変化/湯口の位置の変化/スピードの変化/鋳造機や炉の選択等に対応する機能を持っています。ロボットの動作はティーチングにより、熟練した人が行うのと全く同じような作業を記憶させることができ、安定した繰り返しを行います。またティーチングの変更も簡単にでき、種々の変化に対応できるようになっています。機種としては、PR4C-B(定置式)/PR4CL-B(大型定置式)/PR4C-R(走行式−旋廻なし)/PR5C-R(走行式−旋廻付き)/PR4CL-R(大型走行式−旋廻なし)/PR5CL-R(大型走行式−旋廻付き)/PR4CS(スカラ式超大型)等があります。 |